Esta es la mano robótica que finalmente podría hacerse cargo de su trabajo
Si le preocupa que algún día los robots reemplacen a los humanos y hagan que las personas se vuelvan obsoletas, debería consolarse con el hecho de que una de las partes humanas más difíciles de replicar mecánicamente es la mano. La mano humana puede realizar una cantidad casi infinita de tareas, no solo por la versatilidad de nuestras manos y dedos, sino también porque podemos determinar intuitivamente cuánta fuerza aplicar. Es increíblemente desafiante, por ejemplo, enseñarle a un robot cómo sostener un huevo con dos dedos firmemente sin aplastar la cáscara.
Es posible que un equipo de científicos surcoreanos haya resuelto este problema, y quizás haya abierto la puerta a que los robots finalmente se hagan cargo de nuestros trabajos. En un nuevo artículo publicado en Comunicaciones de la naturaleza, el equipo muestra un nuevo prototipo de mano robótica que puede cambiar su fuerza sobre la marcha y completar una gran variedad de tareas sin ningún problema.
“Para permitir tareas más diversas con robots, queríamos crear un robot que pueda manipular varios objetos como una mano humana”, dijo a The Daily Beast Uikyum Kim, ingeniero de la Universidad de Ajou en Corea del Sur e investigador principal del nuevo estudio. . “Cuando verifiqué las tecnologías actuales de manos robóticas, me di cuenta de que carecían de la capacidad de cortar papel con tijeras o triturar latas como una mano humana. Investigaciones como la nuestra han comenzado a subsanar estas deficiencias “.
Los especialistas en robótica normalmente han tenido éxito al hacer que una mano robótica sea ágil y diestra, o que agarre objetos con la fuerza adecuada. Rara vez pudieron crear algo que marcara ambas casillas. Las piezas robóticas pueden moverse gracias a los llamados actuadores; y son capaces de descubrir qué es un objeto y cómo sostenerlo gracias a los sensores táctiles. Los actuadores y sensores ocupan espacio, y nunca ha sido fácil para los ingenieros instalar ambos tipos de piezas en un espacio estrecho como un dedo.
Kim y sus colegas lograron idear un diseño de ricitos de oro que proporcionó sólo la cantidad correcta de saldo para ambas partes. La nueva mano robótica, a la que llaman ILDA (antropomórfica diestra impulsada por vínculos integrados), consta de unas 20 articulaciones y le da unos 15 grados de movimiento. Pesa alrededor de 1,1 kilogramos, pero tiene una fuerza en la yema del dedo de 34 Newtons (el dedo humano típico puede aplicar alrededor de 47 Newtons).
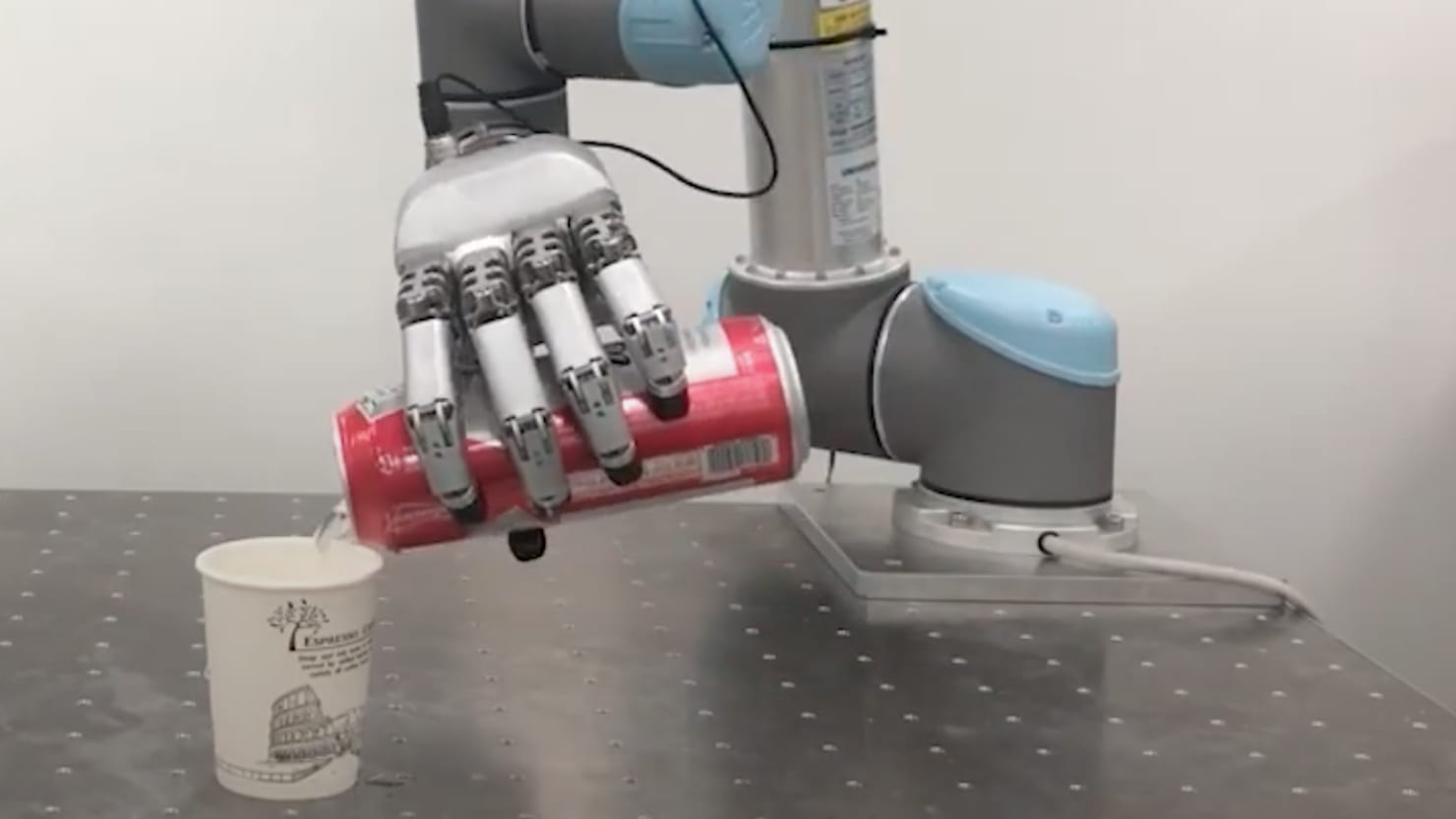
Como puede ver en los videos, ILDA aprendió a cortar papel con tijeras, mover objetos con pinzas, levantar pesas y triturar latas de refresco. Puede alternar entre artes y manualidades y levantamiento de pesas sin perder el ritmo.
Kim explicó que ILDA no necesita modificaciones adicionales para realizar estas diferentes tareas. Debería ser “muy fácil” de integrar en los brazos robóticos comerciales existentes, lo que significa que podríamos verlo asumiendo las tareas industriales o de servicio con un mínimo de formación y pruebas.
Como si eso no fuera suficiente, Kim planea seguir adelante con el desarrollo de mejores sensores táctiles para las versiones más nuevas de ILDA, incluidos los que podrían usarse como parte de una piel artificial para manos robóticas.